Algorithm (Part II) 大複習(完結)

國立臺東大學 資訊工程學系
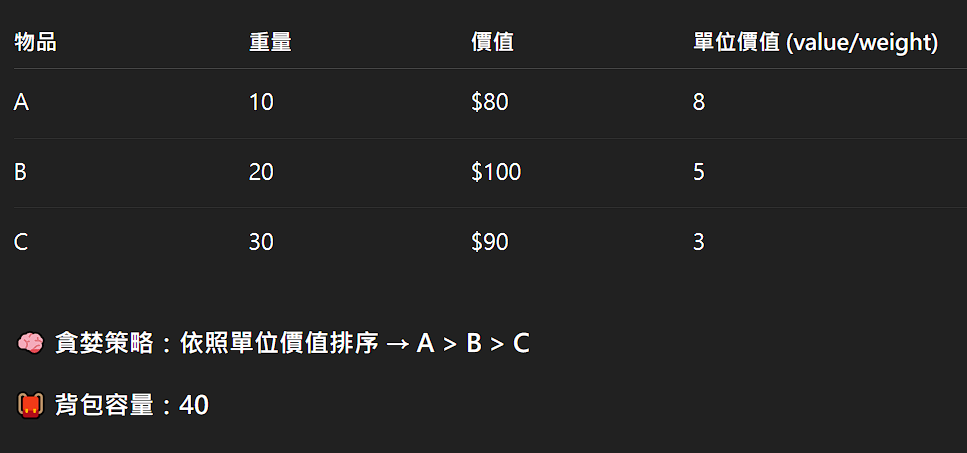
### Greedy Algorithms
對於許多最佳化問題,使用動態規劃來確定最佳選擇有些過度,
更簡單、更有效率的演算法就可以了,也就是說,
它做出局部最優選擇,希望這個選擇能帶來全域最優解。
The Activity-selection Problem
安排一間只能容納一個活動的會議室。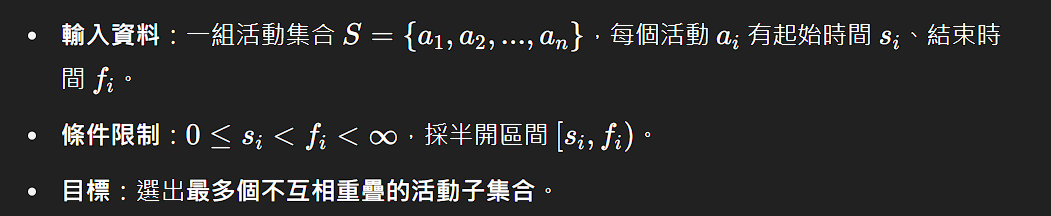





Algorithm (Part I) 大複習
Agenda,1. Insertion Sort,2. Merge-Sort,ymptotic Efficiency,currences,5.HeapSort,6.QuickSort,unting S
